Скалярные и векторные физические величины
Все физические величины можно разделить на два фундаментальных типа: скалярные (рис.1) и векторные (рис.2). Ключевое различие между ними — наличие направления.
Скалярные величины
Характеризуются только числовым значением (модулем) и не имеют направления.
Примеры скалярных величин:
- Масса (m)
- Объём (V)
- Время (t)
- Путь (S)
- Работа (A)
- Давление (P)
- Электрический заряд (q)
- Сила тока (I)
- Температура (T)
Важно: Скалярные величины можно складывать и умножать обычным алгебраическим способом.
Векторные величины
Характеризуются числовым значением (модулем) и направлением в пространстве.
Примеры векторов:
- Скорость (v)
- Ускорение (a)
- Перемещение (s)
- Сила (F)
- Импульс (p)
- Напряженность электрического поля (E)
Важно: Для сложения и вычитания векторов необходимы специальные методы (правило треугольника или параллелограмма).

Сравнительная таблица
| Характеристика | Скалярная величина | Векторная величина |
|---|---|---|
| Определение | Задаётся только числом (модулем) | Задаётся числом (модулем) и направлением |
| Сложение | Алгебраическое | Геометрическое (по правилу параллелограмма или треугольника) |
| Пример | Масса 5 кг | Скорость 5 м/с, на север |
Вектор
Что такое вектор?
Вектор — это направленный отрезок, который характеризуется длиной (модулем) и направлением в пространстве.
Обозначения векторов
- Векторные величины обозначаются буквой со стрелкой:F, p, a
- Длина вектора (модуль) обозначается без стрелки:F, p, a
- Или через обозначение модуля:|F|, |p|,|a|
Правила записи
Равенство векторов
Два вектора называются равными, если они:
- Имеют одинаковую длину (модуль)
- Сонаправлены (имеют одинаковое направление)
Примечание: Равные векторы могут находиться в разных точках пространства — важно лишь их направление и длина.
Дополнительная информация
Нулевой вектор — это вектор с нулевой длиной (модулем). Обозначается 0. Не имеет определенного направления.
Противоположные векторы
Противоположные векторы — это векторы, имеющие одинаковую длину, но противоположно направленные. Если a — вектор, то -a — противоположный ему.
Сложение векторов
Основы сложения векторов
Пусть даны два произвольных вектора F1 и F2. Для сложения векторов используются два основных метода: правило параллелограмма и правило треугольника.
Правило параллелограмма
- Совместите начала векторов F1 и F2 параллельным переносом
- Постройте на этих векторах параллелограмм (как на сторонах)
- Проведите диагональ из общего начала векторов
- Эта диагональ представляет собой сумму векторов F12 = F1 + F2
Особенность: Правило параллелограмма особенно удобно, когда векторы выходят из одной точки.
Правило треугольника
- Отложите вектор F1
- К концу вектора F1 приложите начало вектора F2 (параллельным переносом)
- Проведите вектор из начала F1 в конец F2
- Этот вектор представляет собой сумму F12 = F1 + F2
Особенность: Правило треугольника удобно для последовательного сложения нескольких векторов.
Сравнение методов сложения
| Критерий | Правило параллелограмма | Правило треугольника |
|---|---|---|
| Лучше для | Сложения двух векторов | Сложения трёх и более векторов |
| Условие применения | Векторы выходят из одной точки | Векторы соединены последовательно |
| Визуализация | Диагональ параллелограмма | Замыкающая ломаная линия |
Свойства сложения векторов
Коммутативность
a + b = b + a
От перемены мест слагаемых сумма не меняется
Ассоциативность
(a + b) + c = a + (b + c)
Результат не зависит от порядка сложения
Практический совет
При сложении двух векторов предпочтительнее использовать правило параллелограмма. Когда же речь идет о нахождении суммы трёх и более векторов, лучше последовательно использовать правило треугольника.
Проекция вектора на заданное направление
Что такое проекция вектора?
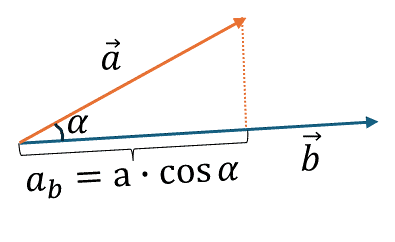
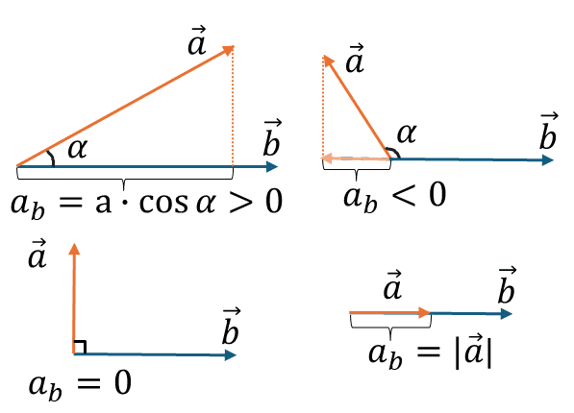
Пусть заданы два вектора a и b. Проекцией вектора a на направление вектора b называется скалярная величина, равная длине отрезка, образованного перпендикулярными проекциями начала и конца вектора a на прямую, содержащую вектор b.
Математическое определение
где:
- ab — проекция вектора a на направление b
- a — модуль (длина) вектора a
- α — угол между векторами a и b
Свойства проекции
- Проекция — величина алгебраическая (число, которое может быть положительным или отрицательным) или геометрическая (проекция вектора на ось как вектор)
- Проекция положительна, если угол α острый (0° ≤ α < 90°)
- Проекция отрицательна, если угол α тупой (90° < α ≤ 180°)
- Проекция равна нулю, если векторы перпендикулярны (α = 90°)
- Проекция равна модулю вектора, если векторы сонаправлены (α = 0°)
Проекция на координатные оси
В физике часто необходимо находить проекции векторов на координатные оси заданной системы отсчёта.
Двумерная система (XOY)
где α — угол между вектором F и осью OX,
β — угол между вектором F и осью OY
Трёхмерная система (XYZ)
где α, β, γ — углы между вектором Fи осями OX, OY и OZ соответственно
Практическое применение
Проекции векторов широко используются в физике для:
- Решения задач на равновесие тел
- Анализа движения под углом к горизонту
- Расчёта работы силы (как проекции силы на направление перемещения)
- Определения момента силы
- Разложения сил на составляющие
Важное замечание
При вычислении проекций важно правильно определить углы между вектором и осями координат. В трехмерном пространстве для этого используются направляющие косинусы, которые удовлетворяют соотношению:
Тригонометрия в физике: sin(α), cos(α), tg(α) и ctg(α)
Основы тригонометрии для физики
Для работы с векторами в физике необходимо уверенно владеть тригонометрическими функциями: синусом, косинусом, тангенсом и котангенсом. Эти функции позволяют находить проекции векторов, решать задачи на равновесие и анализировать различные физические процессы.
Прямоугольный треугольник
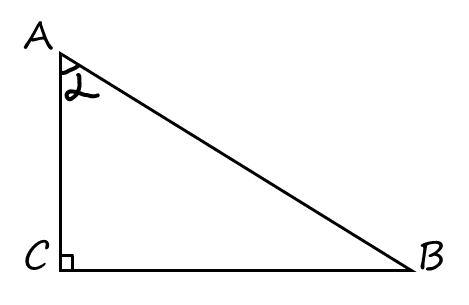
Рассмотрим прямоугольный треугольник ABC, где угол C = 90°, а α — острый угол при вершине A.
Стороны:
- AB — гипотенуза (c)
- BC — противолежащий катет (a)
- AC — прилежащий катет (b)
Углы:
- ∠A = α
- ∠B = β
- ∠C = 90°
Тригонометрические функции
Синус и косинус
Синус острого угла — отношение противолежащего катета к гипотенузе:
Косинус острого угла — отношение прилежащего катета к гипотенузе:
Тангенс и котангенс
Тангенс острого угла — отношение противолежащего катета к прилежащему:
Котангенс острого угла — отношение прилежащего катета к противолежащему:
Связь между тригонометрическими функциями
Основные теоремы геометрии
Для решения физических задач также необходимы знания основных геометрических теорем.
Теорема Пифагора
В прямоугольном треугольнике квадрат гипотенузы равен сумме квадратов катетов:
где c — гипотенуза, a и b — катеты прямоугольного треугольника.
Теорема синусов
Отношение сторон треугольника к синусам противолежащих углов равно диаметру описанной окружности:
где a, b, c — стороны треугольника; α, β, γ — противолежащие углы; R — радиус описанной окружности.
Теорема косинусов
Квадрат стороны треугольника равен сумме квадратов двух других сторон минус удвоенное произведение этих сторон на косинус угла между ними:
где a — сторона треугольника; b, c — другие стороны; α — угол между сторонами b и c.
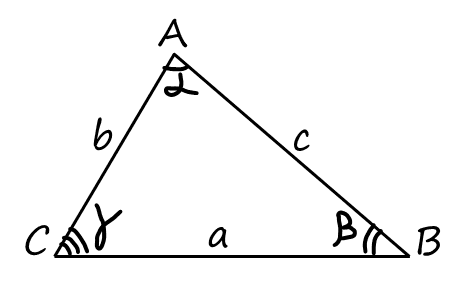
Таблица значений тригонометрических функций
| Угол | sin | cos | tg | ctg |
|---|---|---|---|---|
| 0° | 0 | 1 | 0 | ∞ |
| 30° (π/6) | 1/2 | √3/2 | √3/3 | √3 |
| 45° (π/4) | √2/2 | √2/2 | 1 | 1 |
| 60° (π/3) | √3/2 | 1/2 | √3 | √3/3 |
| 90° (π/2) | 1 | 0 | ∞ | 0 |
Применение в физике
Тригонометрические функции широко применяются в различных разделах физики:
- Нахождение проекций векторов на координатные оси
- Решение задач на равновесие тел
- Анализ гармонических колебаний
- Расчет траекторий движения под углом к горизонту
- Описание волновых процессов
- Расчет работы силы при движении под углом
Разложение векторов на составляющие и базисные векторы
Основы разложения векторов
Любой вектор можно представить в виде суммы двух или более других векторов. Это преобразование называется разложением вектора и широко применяется при решении физических и геометрических задач, позволяя упростить сложные операции.
Базисные векторы
Базисные векторы — это особые векторы единичной длины, направленные вдоль координатных осей. Они образуют основу (базис) координатной системы.
В трехмерном пространстве:
- — единичный вектор вдоль оси X
- — единичный вектор вдоль оси Y
- — единичный вектор вдоль оси Z
Свойства базисных векторов: Все базисные векторы имеют длину 1, взаимно перпендикулярны и образуют правую тройку векторов.
Формулы разложения
Разложение вектора:
где — проекции вектора на соответствующие оси координат
Модуль вектора:

Примеры разложения векторов
Двумерное пространство
В двумерном пространстве вектор раскладывается на две компоненты:
Компоненты находятся через угол α между вектором и осью X:
Трехмерное пространство
В трехмерном пространстве вектор раскладывается на три компоненты:
Компоненты находятся через направляющие косинусы:
Практическое применение в физике
Преимущества разложения
- Упрощение векторных операций (сложение, вычитание)
- Возможность работы с проекциями вместо полных векторов
- Упрощение решения систем уравнений
- Возможность применения алгебраических методов
Примеры применения
- Анализ сил в механике
- Расчет напряженности электрического поля
- Определение магнитной индукции
- Решение задач кинематики
- Расчет работы и энергии
Связь с координатами точек
Если вектор задан координатами начальной и конечной точек, его проекции можно найти как разности соответствующих координат:
где A(x₁, y₁, z₁) — начальная точка, B(x₂, y₂, z₂) — конечная точка вектора
Ортогональные и ортонормированные базисы
Ортогональный базис
Базисные векторы перпендикулярны друг другу, но могут иметь произвольную длину.
Ортонормированный базис
Базисные векторы перпендикулярны друг другу и имеют единичную длину. Именно такой базис используется чаще всего.
Важно: В ортонормированном базисе скалярное произведение базисных векторов равно нулю при разных индексах и единице при одинаковых: ,.
Скалярное и векторное произведение векторов
Операции с векторами
Для работы с векторами в физике используются две основные операции умножения: скалярное произведение (результат - число) и векторное произведение (результат - вектор). Эти операции играют ключевую роль в различных разделах физики.
Скалярное произведение
Скалярным произведением двух векторов F1 и F2 называется число, равное произведению модулей этих векторов на косинус угла между ними.
Формулы:
Свойства:
- Коммутативно: a · b = b · a
- Дистрибутивно: a · (b + c) = a · b + a · c
- Если векторы перпендикулярны, скалярное произведение равно нулю
Векторное произведение
Векторным произведением двух векторов F1 и F2 называется вектор, перпендикулярный плоскости, содержащей эти векторы.
Формулы:
Свойства:
- Антикоммутативно: a × b = -b × a
- Дистрибутивно: a × (b + c) = a × b + a × c
- Если векторы параллельны, векторное произведение равно нулю


Сравнение произведений векторов
| Характеристика | Скалярное произведение | Векторное произведение |
|---|---|---|
| Результат | Скаляр (число) | Вектор |
| Обозначение | a · b | a × b |
| Коммутативность | Да | Нет (антикоммутативно) |
| Зависимость от угла | cos α | sin α |
| Максимальное значение | |a|·|b| (при α=0°) | |a|·|b| (при α=90°) |
| Нулевое значение | При α=90° | При α=0° или α=180° |
Применение в физике
Скалярное произведение
- Работа силы: A = F · s
- Мощность: P = F · v
- Поток векторного поля: Φ = E · S
Векторное произведение
- Момент силы: M = r × F
- Угловая скорость: v = ω × r
- Момент импульса: L = r × p
Геометрическая интерпретация
Скалярное произведение
Скалярное произведение равно произведению модуля одного вектора на проекцию второго вектора на направление первого:
Векторное произведение
Модуль векторного произведения равен площади параллелограмма, построенного на этих векторах:
Правило правой руки для векторного произведения
Для определения направления вектора, являющегося результатом векторного произведения, используется правило правой руки:
- Расположите правую руку так, чтобы пальцы были направлены вдоль первого вектора
- Согните пальцы в направлении ко второму вектору по кратчайшему пути
- Отставленный большой палец укажет направление результирующего вектора